Welcome to OSMTEC - Optimal Stepper Motor!
 CART
CARTThis is a artical talking about the Stepper Motor Speed and Torque Relationship, after read this topic, your will be more familiar with the stepper motor.
What is Torque for a Stepper Motor?
When you're looking for a stepper motor, you'll often see statistics related to torque. Torque information isn't the only thing you'll be looking at when it comes to selecting your motor, but it is important. Generally, you'll be looking at information regarding how much torque the stepper produces under certain conditions. Before you start examining the different types of torque and the relationship of torque to stepper motor speed, it's important to understand exactly what torque is.
Simply put, torque is rotational force; that is, it's the force used to turn things. This force is measured in pound-feet in the English system, but the international standard is Newton-Meters (or in the case of a small stepper motor, milliNewton Meters (mNm)), meaning the amount of force applied in Newtons times the distance to the center of the rotating object in meters.
Torque / Speed Curves
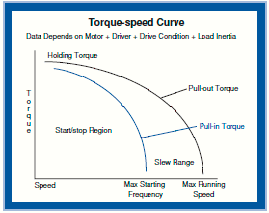
It is very important to know how to read a torque/speed curve because it describes what a stepper motor can and cannot do. It is also important to keep in mind that a torque/speed curve is for a given motor and a given driver. Torque is dependent on the driver type and voltage. The same motor can have a very different torque/speed curve when used with a different driver. The torque/speed curves in this catalog are given for reference only. The same motor with a similar drive, similar voltage and similar current should give similar performance. Torque/speed charts can also be used to roughly estimate the torque produced using different drivers at varying voltages and currents.
Detent Torque -amount of torque that the motor produces when it is not energized. No current is flowing through the windings.
Pull-in Torque Curve -Shows the maximum value of torque at given speeds that the motor can start, stop or reverse in synchronism with the input pulses. The motor cannot start at a speed that is beyond this curve. It also cannot instantly reverse or stop with any accuracy at a point beyond this curve.
Stop / Start Region -area on and underneath the pull-in curve. For any load value in this region, the motor can start, stop, or reverse "instantly" (no ramping required) at the corresponding speed value.
Pull-out Torque Curve -Shows the maximum value of torque at given speeds that the motor can generate while running in synchronism. If the motor is run outside of this curve, it will stall.
Slew Range -the area between the pull-in and the pull-out curves, where to maintain synchronism, the motor speed must be ramped (adjusted gradually).
Torque / Speed Curves
Torque is proportional to the winding current and the number of turns of wire. To increase torque by 20%, increase the current by about 20%. To decrease the torque by 50%, reduce the current by 50%. Because of magnetic saturation, there is no advantage to increasing the current to more than 2 times the rated current and doing so may damage the motor.
Inductance reduces a stepper motor's high speed torque performance. Inductance is the reason all motors eventually lose torque at higher speeds. Each stepper motor winding has a certain value of inductance and resistance.
The "electrical time constant" is the amount of time it takes a motor coil to charge up to 63% of its rated value. If a stepper motor is rated at 1 amp, after one time constant, the coil will be at 0.63 amps, giving the motor about 63% of rated torque. After two time constants, the current will increase to 0.86 amps, giving the motor about 86% of rated torque.
t = L/R
Inductance “L” (mH), divided by resistance “R” (&), gives the electrical time constant “t” (ms).
At low speeds, high inductance is not a problem. Current can easily flow into the motor windings fast enough that the stepper motor has rated torque. At high speeds, however, sufficient current cannot get into the winding fast enough before the current is switched to the next phase, thereby reducing motor torque. Increasing the driver voltage can fight this loss of torque at higher speeds by forcing current into the windings of the motor at an increased rate. In summary, the current and the number of coil turns in the windings determine a motor's maximum torque output, while the voltage applied to the motor and the inductance of its windings will affect the speed at which a given amount of torque can be generated.
Subscribe our NewsletterSubscribe to get lastest news for products and special offers!
Established in 1992, OSM Technology Co.,Ltd. began as a consulting company specializing in Stepper motor applications. Throughout its history, OSMTEC has continued to develop its capabilities in the areas of design engineering, manufacturing, and customer service. In 1995, OSMTEC expanded its operatings to include the manufacturing of its own Hybrid Stepper Motor. Since then, the company has developed its product line to include Linear Actuator and Brushless DC Motor.
Our operations are certified to ISO 9001:2000 and QS 9000. All products carry major approvals such as CE and ROSH. With OSMTEC Technology, you get the highest quality products, all made possible by the most dedicated people.
CONTACT
Email: [email protected]
Phone: (+86)574 28837284
Adress: No. 535, Renmin Road, Jiangbei District Ningbo CN 315000
15-4, #799 Hushan Rd., Jiangning District, Nanjing CN, 211100
Powered By OSMTEC © 2024